On June 12, 2026, the research team led by Researcher Chunyu Ding from the Institute for Advanced Study at Shenzhen University published new findings in the international journal npj Space Exploration. The paper, entitled Strategic exploration of Elysium Mons Cave Zone on Mars: implications for AI-driven robotic dogs, focuses on a potential cave candidate west of Elysium Mons on Mars. Using multi-source orbital remote-sensing data, the study evaluates the candidate site and proposes an AI-driven quadruped robotic exploration framework for future Martian cave investigations.
The study was led by postdoctoral researcher Ravi Sharma as the first author, with Researcher Chunyu Ding serving as the corresponding author. Professor Yachen Xie from Sichuan University, Researcher Yan Su from the National Astronomical Observatories of the Chinese Academy of Sciences, Professor Francesco Soldovieri from the Institute for Electromagnetic Sensing of the Environment of the Italian National Research Council, Professor Fei Li from the Southern University of Science and Technology, and faculty members and students from the Institute for Advanced Study—including Yuxiao Zhi, Jiangwan Xu, Zhonghan Lei, Xiaohang Qiu, Haoyu Chen, Zihang Liang, Changzhi Jiang, Mi Song, and Wentao Chen—also contributed to the research. The Institute for Advanced Study at Shenzhen University is the first affiliated institution of the paper.
The team integrated and analyzed Mars Context Camera (CTX) and High Resolution Imaging Science Experiment (HiRISE) imagery, Thermal Emission Imaging System (THEMIS) infrared data, Mars Orbiter Laser Altimeter (MOLA) topographic data, as well as elemental and mineralogical information from the Gamma Ray Spectrometer (GRS) and Thermal Emission Spectrometer (TES). The results show that the candidate feature displays an elliptical opening, local collapse structures, and persistent shadowing. Its dark interior remains visible under different illumination conditions, while relatively strong nighttime and early-morning thermal retention is also observed. Combined with the regional volcanic setting, slope, surface roughness, and mineralogical context, these observations suggest that the feature may represent a possible skylight formed by the collapse of a subsurface lava tube.
To address challenges near the cave entrance—including steep slopes, boulders, low-light conditions, and constrained communication—the team proposed an AI-driven quadruped robotic exploration platform. The system could carry scientific payloads such as LiDAR, optical and depth cameras, environmental sensors, and penetrating radar for entrance reconnaissance, three-dimensional mapping, environmental monitoring, and subsurface structural investigation. The study further proposes a dual-robot collaborative mode: one robot remains on the surface to provide communication relay, power support, and safety monitoring, while the other descends into the cave using a tether-assisted system to conduct detailed exploration.
The team also conducted preliminary planning for potential landing areas and traversal routes. A preferred landing site is located approximately 0.5 km from the cave entrance, with a slope of about 1°, providing an initial engineering reference for safe landing, surface mobility, and tether-assisted descent in future missions. By linking cave-candidate identification, scientific assessment, and robotic mission design, this study offers a new approach for future exploration of Martian subsurface environments.
This research was supported by the National Natural Science Foundation of China, the Natural Science Foundation of Guangdong Province, the Shenzhen Municipal Science and Technology Innovation Commission, and the Shenzhen University 2035 Excellence Research Program.
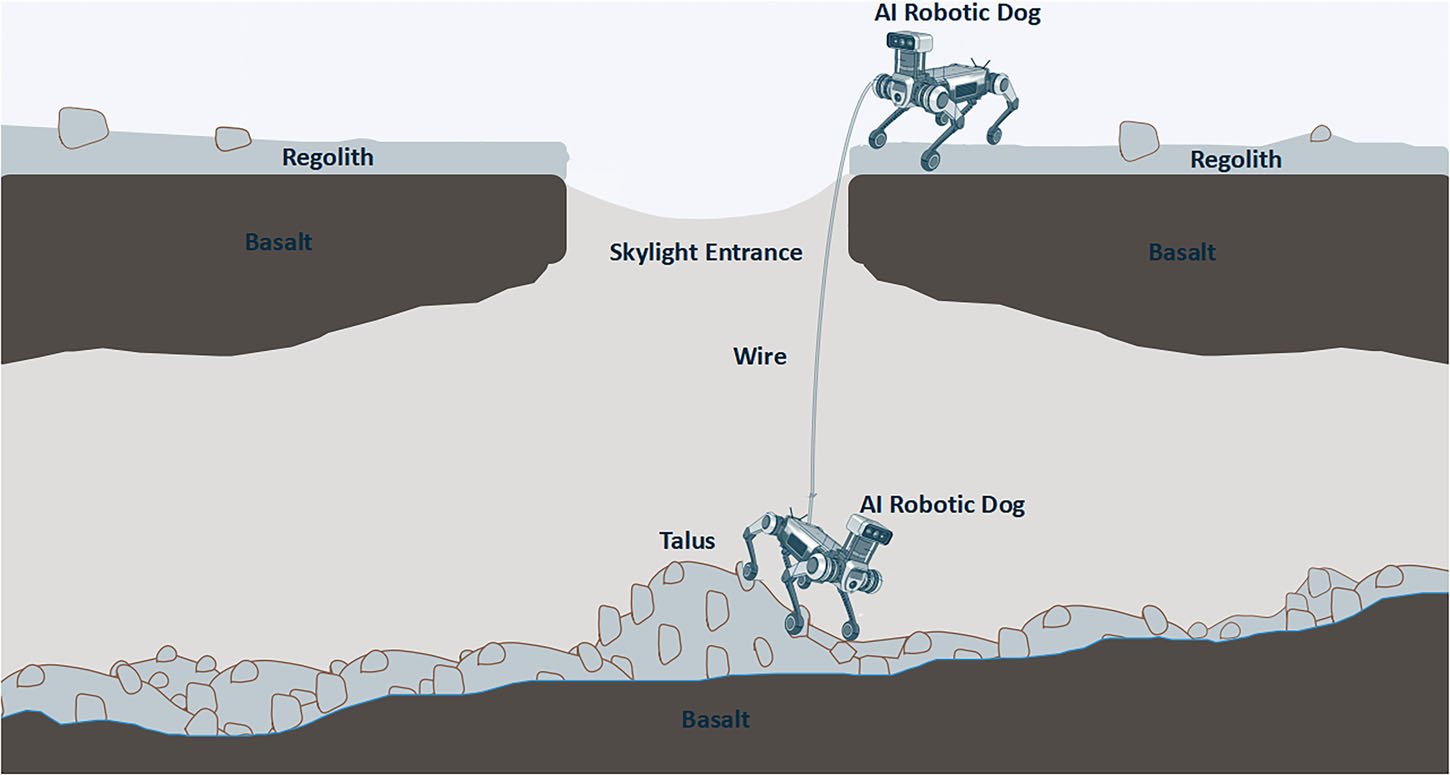
Figure 1. Conceptual illustration of an AI-driven quadruped robot for Martian subsurface cave exploration.
Paper link: https://www.nature.com/articles/s44453-026-00039-8

