2026年6月12日,高等研究院丁春雨研究员团队在国际期刊《npj Space Exploration》发表研究成果。论文“Strategic exploration of Elysium Mons Cave Zone on Mars: implications for AI-driven robotic dogs”聚焦火星埃律西昂山西侧潜在洞穴候选体,利用多源轨道遥感数据开展验证,并提出AI驱动四足机器人协同探测方案。论文由博士后Ravi Sharma担任第一作者,丁春雨研究员为通讯作者。四川大学谢亚辰教授、中国科学院国家天文台苏彦研究员、意大利国家研究委员会IREA的Francesco Soldovieri教授、南方科技大学李斐教授及高等研究院支羽萧、徐讲湾、雷钟涵、邱小航、陈浩钰、梁梓航、蒋畅之、宋蜜、陈文韬等师生共同参与。深圳大学高等研究院为第一完成单位。
团队综合分析火星CTX、HiRISE影像、THEMIS热红外、MOLA地形以及GRS、TES元素与矿物学数据。结果显示,候选体具有椭圆形开口、局部塌陷和稳定阴影等特征;不同光照条件下,内部暗区持续存在,夜间和清晨呈现较强热保持特征。结合区域火山地质、坡度、粗糙度和矿物学背景,团队认为该结构可能与地下熔岩管塌陷形成的“天窗”有关。
针对入口附近陡坡、碎石、低光照和通信受限等挑战,团队提出采用AI驱动四足机器人开展探测。平台可搭载激光雷达、光学与深度相机、环境传感器和穿透探测雷达,用于洞口勘察、三维建图、环境监测和地下结构识别。研究提出双机器人协同模式:一台留在地表负责通信中继、供电支持和安全监测,另一台通过缆绳辅助进入洞穴内部开展精细探测。
团队还初步规划了候选着陆区及移动路径。较优着陆位置距洞穴入口约0.5公里、坡度约1°,可为未来机器人安全着陆、移动和缆绳辅助下降提供工程参考。该研究将洞穴候选体识别、科学分析与机器人任务设计相衔接,为未来火星地下空间探测提供新思路。
本研究得到国家自然科学基金、广东省自然科学基金、深圳市科技创新局及深圳大学2035追求卓越研究计划等项目支持。
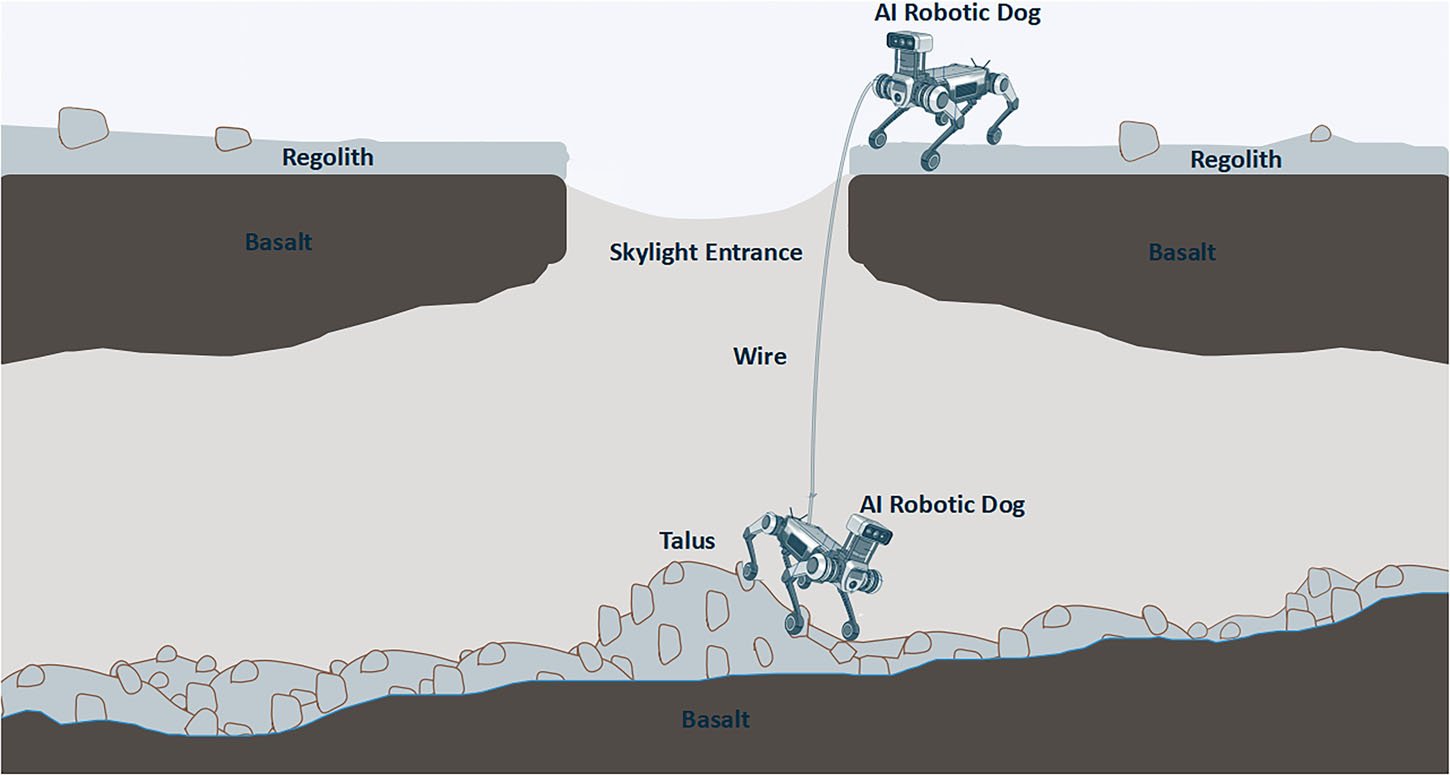
图1.面向火星地下洞穴探测的AI驱动四足机器人概念图。
论文链接:https://www.nature.com/articles/s44453-026-00039-8

